Dr Kai-Fung Chu
Assistant Professor (UK Lecturer) in AI
School of Engineering Mathematics and Technology, University of Bristol
Email: kaifung.chu [AT] bristol.ac.uk
Dr Kai-Fung Chu is an Assistant Professor (UK Lecturer) in AI in the School of Engineering Mathematics and Technology at the University of Bristol. He received the Ph.D. degree from the Department of Electrical and Electronic Engineering, The University of Hong Kong, and the M.Sc. (Distinction) and B.Eng. (First Class Honors) degrees from the Department of Electronic and Information Engineering, The Hong Kong Polytechnic University. Prior to joining the University of Bristol, he was a Marie Skłodowska-Curie Fellow at the the Bio-Inspired Robotics Laboratory within the Machine Intelligence Laboratory research group at the Department of Engineering, University of Cambridge, Research Assistant Professor at the Department of Computing, The Hong Kong Polytechnic University, and a Research Fellow of the School of Aerospace, Transport and Manufacturing, Cranfield University. He also worked in the industry as an engineer for several years. His research focuses on multi-agent systems, physical reservoir computing, robot learning and control, and intelligent transportation systems.
News
My Research
Mobility systems are undergoing a profound transition by AI and robotics, evolving into highly complex dynamical and multi-agent systems in modern society. My research adopts a multi-scale co-design perspective to shape collective, emergent behaviour at the system level from embodied intelligence at the vehicle level. Through the integration of robotics, machine learning, and control theory, I aim to enable resilient, efficient, and scalable mobility solutions.
Multi-Agent Systems [#MAS]
Decentralized coordination of large-scale systems
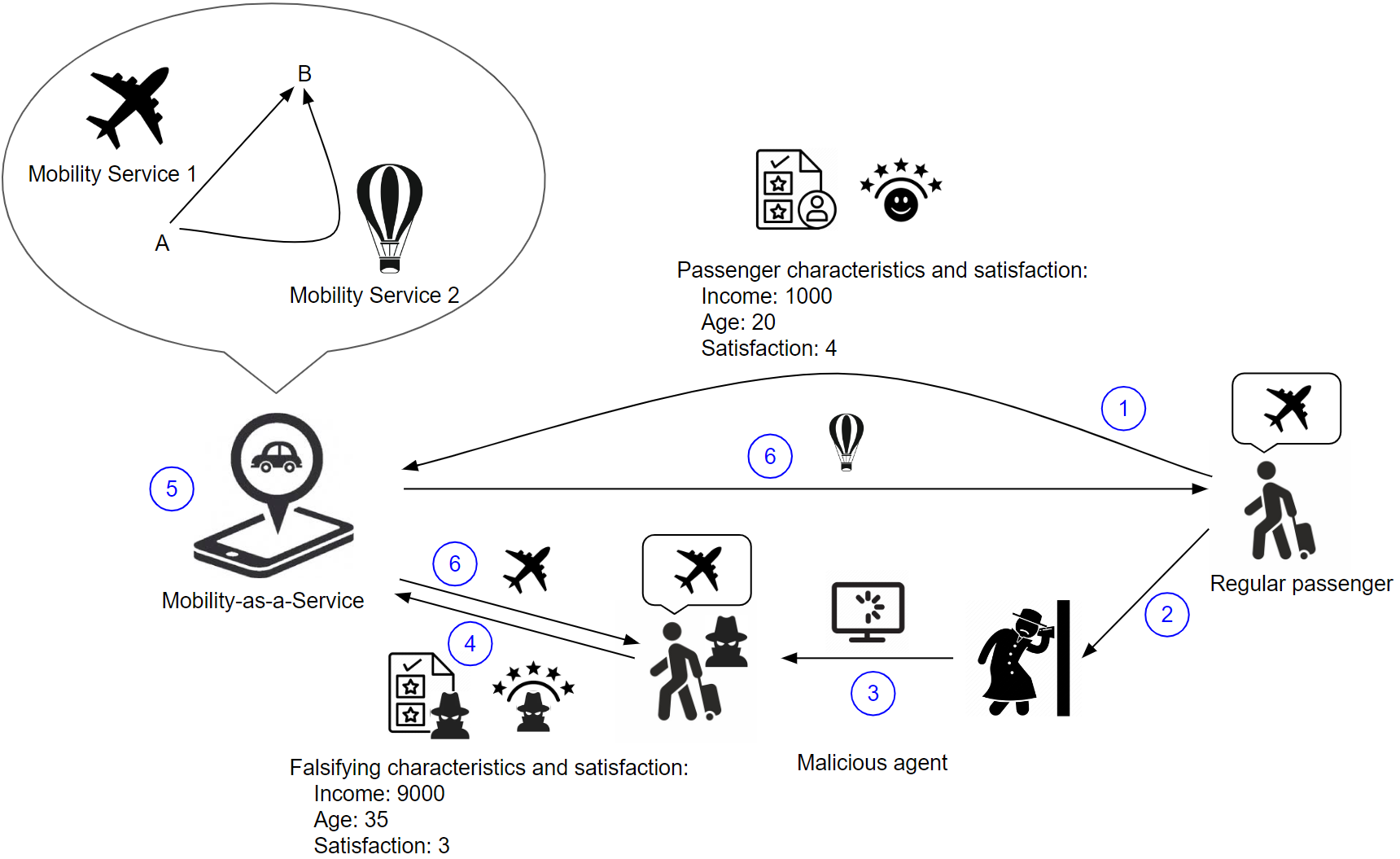
Multi-agent Reinforcement Learning-based Passenger Spoofing Attack

Rewiring Complex Networks to Achieve Cluster Synchronization
Selected [#MAS] Publications
- Kai-Fung Chu and Weisi Guo, “Multi-agent Reinforcement Learning-based Passenger Spoofing Attack on Mobility-as-a-Service,” IEEE Transactions on Dependable and Secure Computing, vol. 21, no. 6, pp. 5565-5581, Nov.-Dec. 2024. [#ITS] [#MAS]
- Kai-Fung Chu, Albert Y.S. Lam, and Victor O.K. Li, “Joint Rebalancing and Vehicle-to-Grid Coordination for Autonomous Vehicle Public Transportation System,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7156-7169, Jul. 2022. [#ITS] [#MAS]
- Mengbang Zou, Weisi Guo, and Kai-Fung Chu, “Rewiring Complex Networks to Achieve Cluster Synchronization using Graph Convolution Networks with Reinforcement Learning,” IEEE Transactions on Network Science and Engineering, vol. 11, no. 5, pp. 4293-4304, Sept.-Oct. 2024. [#MAS] [#RL&C]
Physical Reservoir Computing [#PRC]
Using physical systems as computational reservoirs.
Vehicular Reservoir Computing
Pendulum Coupling Using Physical Reservoir Control
Selected [#PRC] Publications
- Kai-Fung Chu, Fan Ye, Arsen Abdulali, and Fumiya Iida, “Enhancing Traffic Dynamics-Induced Machine Learning Through Heterogeneous Driving Policies,” npj Unconventional Computing, vol. 2, no. 18, Jul. 2025. [#PRC] [#ITS]
- Fan Ye, Arsen Abdulali, Kai-Fung Chu, Xiaoping Zhang, and Fumiya Iida, “Reservoir Controllers Design Through Robot-Reservoir Timescale Alignment,” Communications Engineering, vol. 4, no. 81, Apr. 2025. [#PRC] [#RL&C]
- Yanjun Zhou, Fan Ye, Kai-Fung Chu, and Fumiya Iida, “Scalable Mobile Swarm Network for Reservoir Computing Using Gaussian Kernel Density Estimation,” Neural Networks, vol. 195, Mar. 2026. [#PRC] [#MAS]
Robot Learning and Control [#RL&C]
Integration of machine learning and control theory for robotics systems
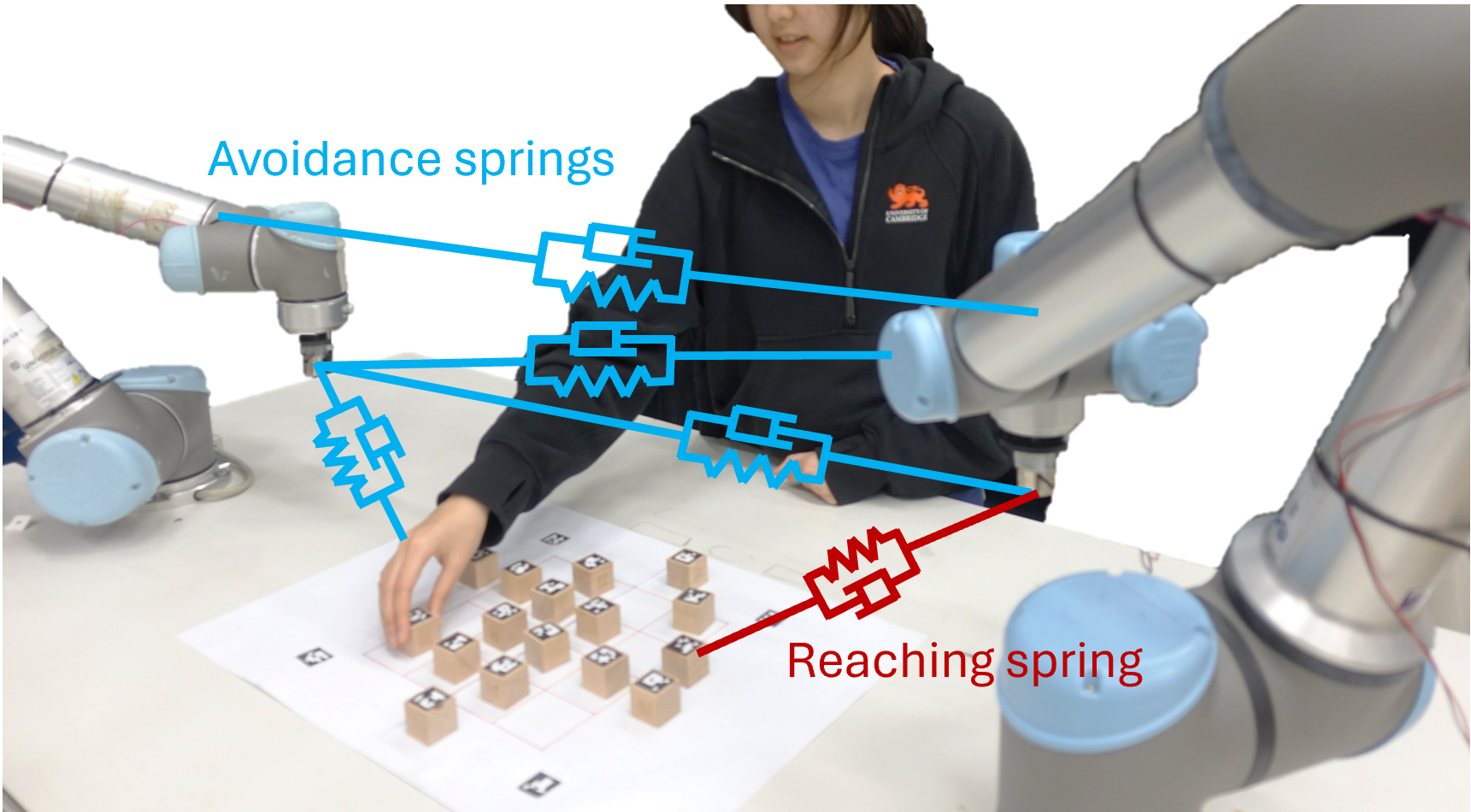
Human-Robot Collaboration by Virtual Model Control
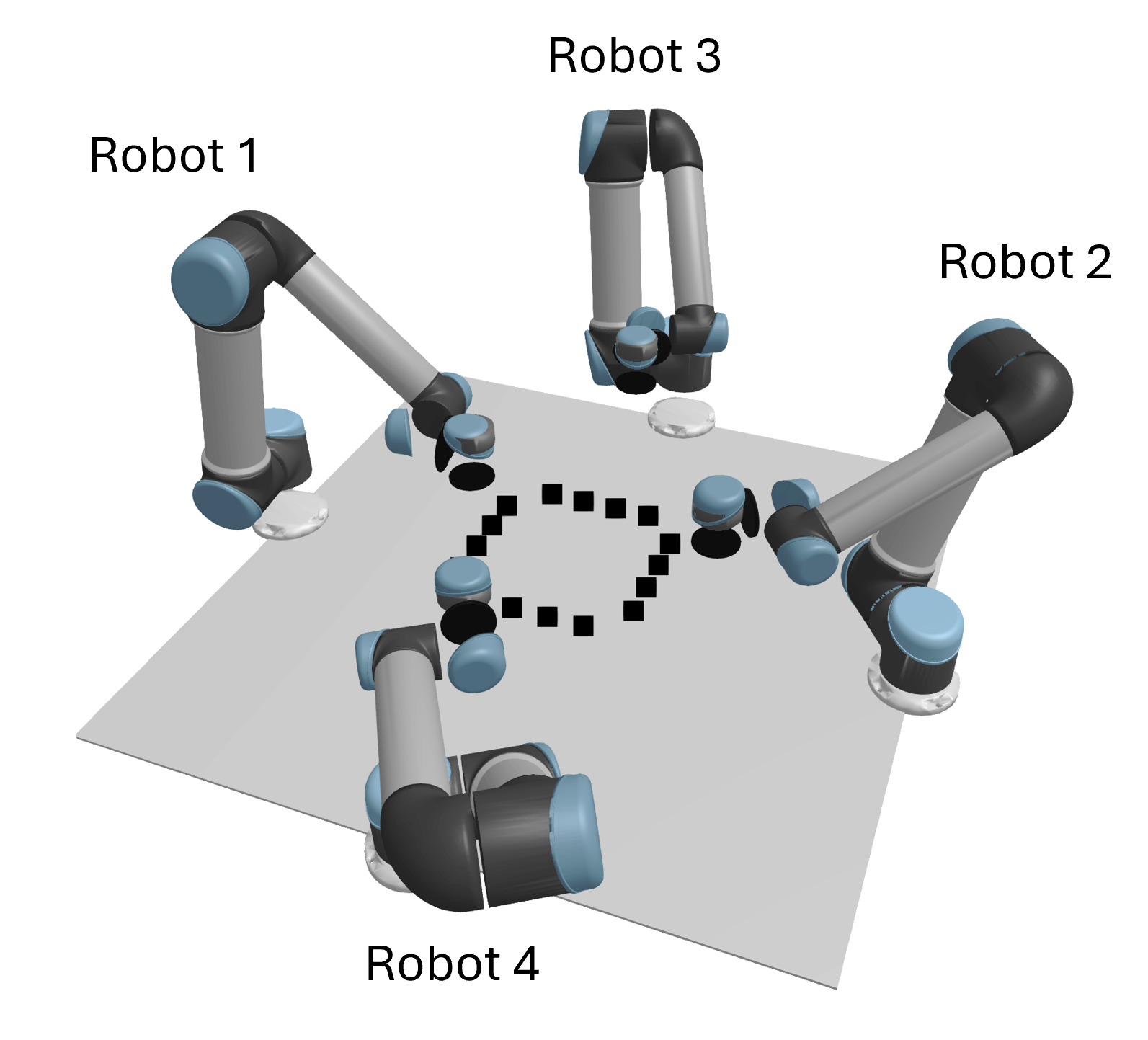
Scalable Multi-Robot Collaboration
Selected [#RL&C] Publications
- Yi Zhang, Omar Faris, Chapa Sirithunge, Kai-Fung Chu, Fumiya Iida, and Fulvio Forni, “Distributed Virtual Model Control for Scalable Human-Robot Collaboration in Shared Workspace,” International Conference on Robotics and Automation, Vienna, Austria, Jun. 2026. [#RL&C] [#MAS]
- Kai-Fung Chu, Albert Y.S. Lam, Chenchen Fan, and Victor O.K. Li, “Disturbance-Aware Neuro-Optimal System Control Using Generative Adversarial Control Networks,” IEEE Transactions on Neural Networks and Learning Systems, vol. 32, no. 10, pp. 4565-4576, Oct. 2021. [#RL&C]
- Kai-Fung Chu, Albert Y.S. Lam, and Victor O.K. Li, “Traffic Signal Control Using End-to-End Off-policy Deep Reinforcement Learning,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7184-7195, Jul. 2022. [#RL&C] [#ITS]
Intelligent Transportation Systems [#ITS]
AI-driven traffic control, autonomous vehicles, and mobility systems
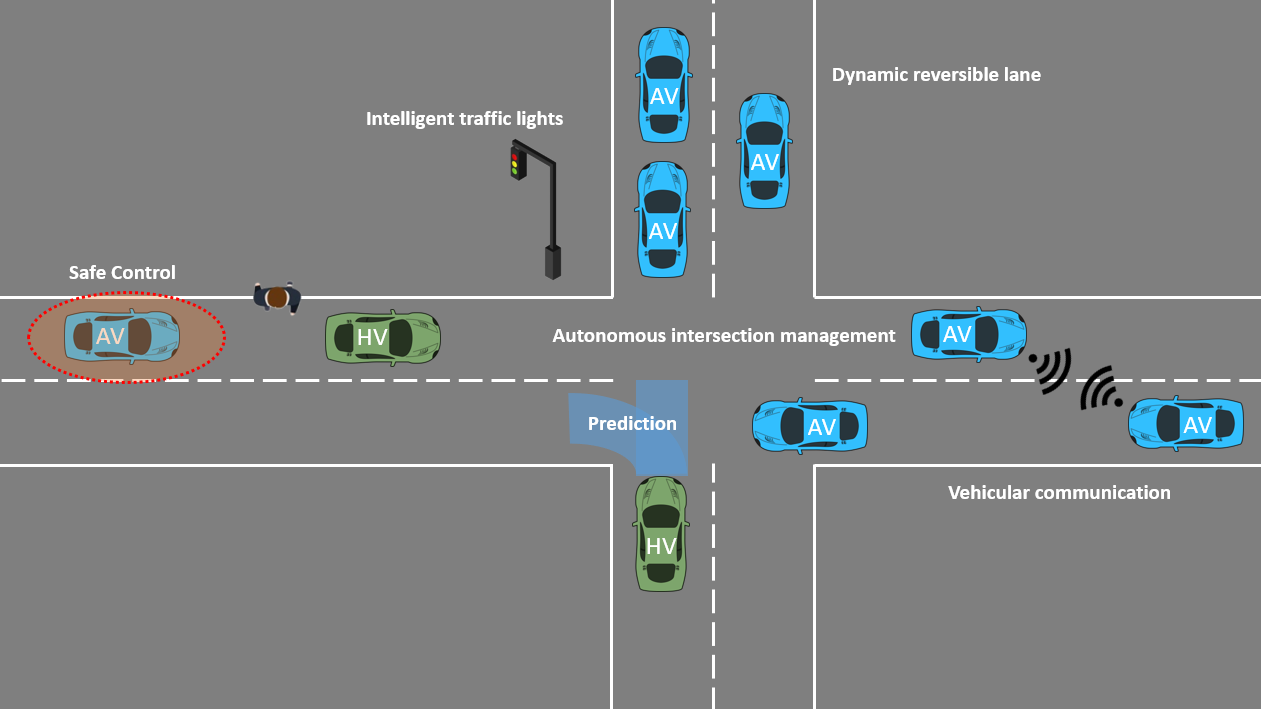
Interaction Between Autonomous Vehicles, Human-Driven Vehicles, and Intelligent Systems in ITS
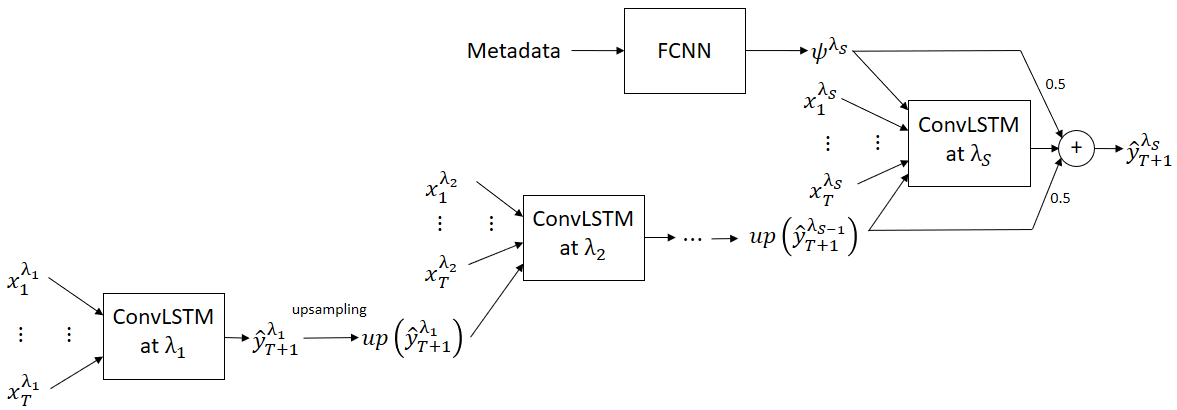
Deep Multi-Scale Convolutional LSTM Network for Travel Demand and Origin-Destination Predictions
Selected [#ITS] Publications
- Kai-Fung Chu, Albert Y.S. Lam, and Victor O.K. Li, “Deep Multi-Scale Convolutional LSTM Network for Travel Demand and Origin-Destination Predictions,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 8, pp. 3219-3232, Aug. 2020. [#ITS]
- Kai-Fung Chu and Weisi Guo, “Privacy-Preserving Federated Deep Reinforcement Learning for Mobility-as-a-Service,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 2, pp. 1882-1896, Feb. 2024. [#ITS] [#MAS]
- Kai-Fung Chu, Albert Y.S. Lam, Ka Ho Tsoi, Zhiran Huang, and Becky P.Y. Loo, “Deep Encoder Cross Network for Estimated Time of Arrival,” IEEE Access, vol. 11, pp. 76095–76107, Jul. 2023. [#ITS]
Publications
See Google Scholar page for most updated list
Selected Publications
- Kai-Fung Chu, Fan Ye, Arsen Abdulali, and Fumiya Iida, “Enhancing Traffic Dynamics-Induced Machine Learning Through Heterogeneous Driving Policies,” npj Unconventional Computing, vol. 2, no. 18, Jul. 2025. [#PRC] [#ITS]
- Kai-Fung Chu, Albert Y.S. Lam, and Victor O.K. Li, “Deep Multi-Scale Convolutional LSTM Network for Travel Demand and Origin-Destination Predictions,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 8, pp. 3219-3232, August 2020. [#ITS]
- Kai-Fung Chu, Albert Y.S. Lam, Chenchen Fan, and Victor O.K. Li, “Disturbance-Aware Neuro-Optimal System Control Using Generative Adversarial Control Networks,” IEEE Transactions on Neural Networks and Learning Systems, vol. 32, no. 10, pp. 4565-4576, Oct. 2021. [#RL&C]
- Kai-Fung Chu and Weisi Guo, “Privacy-Preserving Federated Deep Reinforcement Learning for Mobility-as-a-Service,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 2, pp. 1882-1896, Feb. 2024. [#ITS] [#MAS]
- Kai-Fung Chu, Albert Y.S. Lam, and Victor O.K. Li, “Traffic Signal Control Using End-to-End Off-policy Deep Reinforcement Learning,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7184-7195, Jul. 2022. [#ITS] [#RL&C]
Teaching
University of Cambridge
The Hong Kong Polytechnic University
The University of Hong Kong
Professional Services
Associate and Guest Editor
Reviewer
ACM TIOT, ACM TOSEM, IEEE Access, IEEE OJVT, IEEE T-AI, IEEE T-BD, IEEE T-ETCI, IEEE T-EVC, IEEE T-IE, IEEE IoT-J, IEEE T-ITS, IEEE T-IV, IEEE T-NNLS, IEEE T-NSM, IEEE T-SG, IEEE T-TE, IEEE T-VT, IET ITS, IJIS, ITU J-FET on Vehicular networks, J. Advanced Transportation, J. Scheduling, J. Transport Geography, Nature Communications, Proceedings of the IEEE, RA-L, Scientific Reports, Transportmetrica A Transport Science, Transportmetrica B Transport Dynamics, Travel Behaviour and Society
AAAI2025, CDC2019, DASA2020, EAI SmartGIFT 2024, EECon2024, EI2023, EI2025, ICRA2024, INFOCOM2020, IROS2025, IROS2026, ITSC2024, ITSC2022, ITSC2021, ITSC2018, TAROS2023